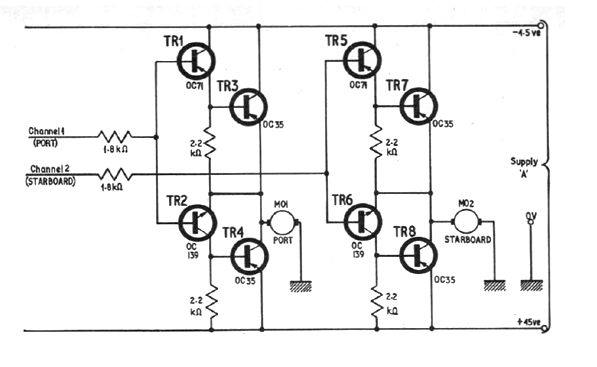
This motor control for robots is from an English documentation from 1968. The original transistors are made of germanium, but we can use silicon equivalents and the voltage must be according to the motors used.

This motor control for robots is from an English documentation from 1968. The original transistors are made of germanium, but we can use silicon equivalents and the voltage must be according to the motors used.


